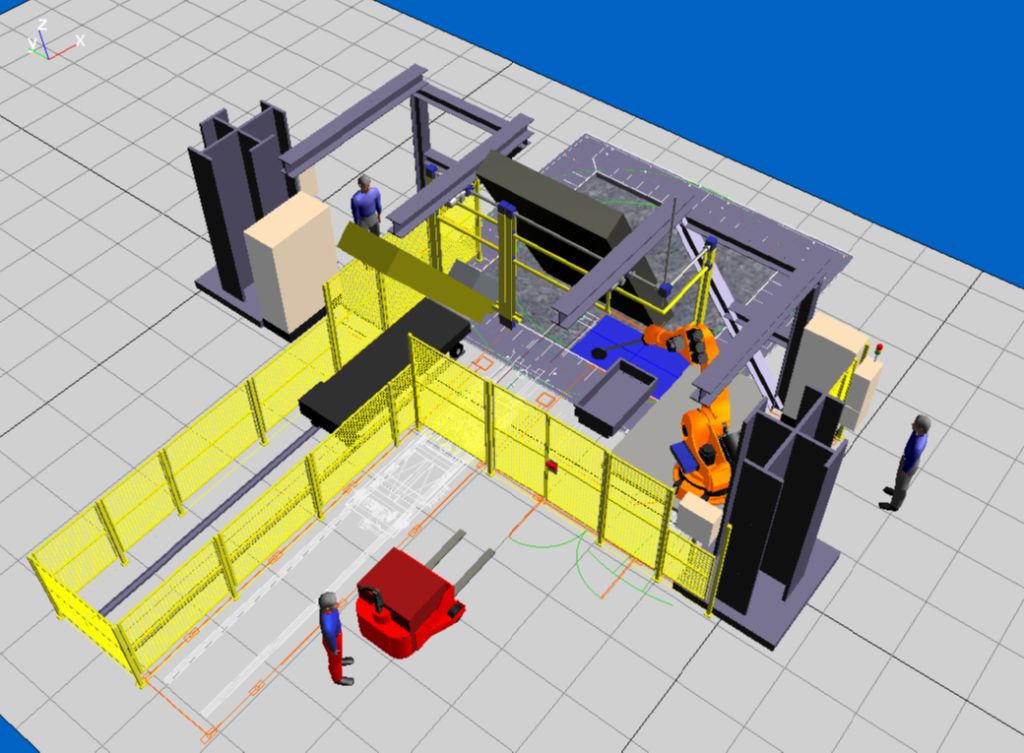
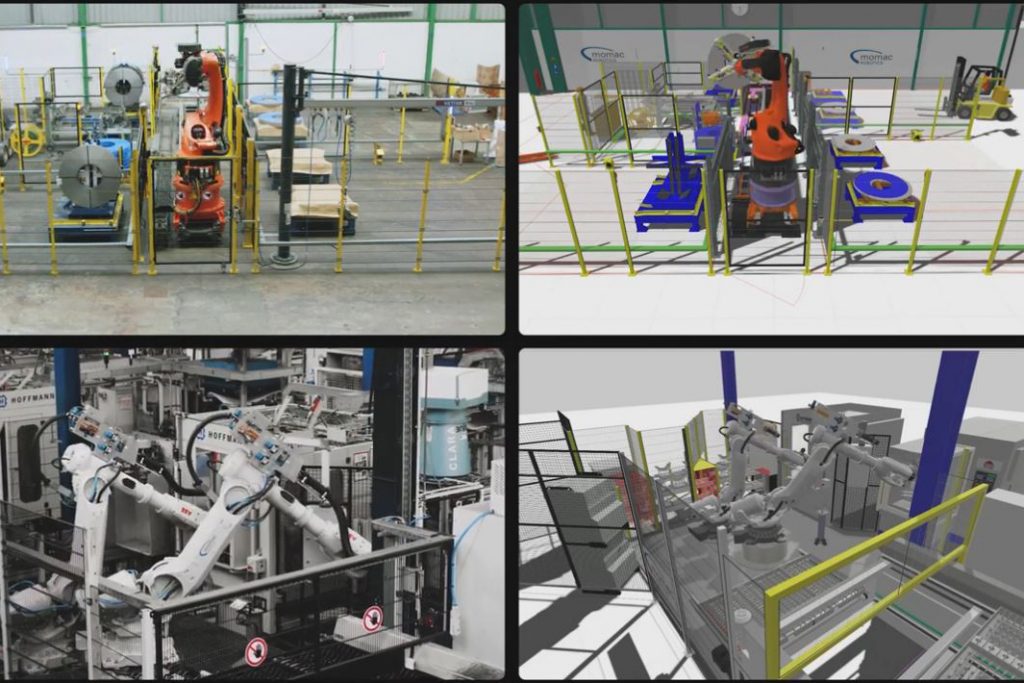
Die von uns eingesetzten 3D-Simulationen ermöglichen nicht nur die vollständige Simulation der eigentlichen Roboterbewegungen, sondern ermöglichen die Gesamtbetrachtung aller Anlagen- und Umfeldparameter, bis hin zu einer Darstellung der gesamten Roboteranlage in virtueller Realität (VR-Simulation).
Mittels 3D Brille ist es dann möglich die offline programmierte Roboteranlage in Ihrer „virtuellen Umgebung“ vollumfänglich zu planen.
Selbst ergonomische Prüfungen sind durch den späteren Anlagenbediener möglich.
Etwaige Schwachstellen der Roboteranlage außerhalb des eigentlichen Roboterprogramms können so schon in der Planung erkannt und vermieden werden.
Erreichbarkeitsprüfungen, Taktzeitanalysen und Kollisionsprüfungen sind fester Bestandteil der von uns durchgeführten Offline-Roboterprogrammierung.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}