Automatisierte Entladung einer Sandstrahlanlage für Blechprodukte mit einem Roboter
Im Werk eines unserer erfolgte die Abnahme von schweren Stahlbleche nach dem Sandstrahlen manuell. Wir waren uns sicher, dass wir eine Möglichkeit finden würden, diesen Prozess zu automatisieren und dadurch die Effizienz und Sicherheit der Produktion zu erhöhen.
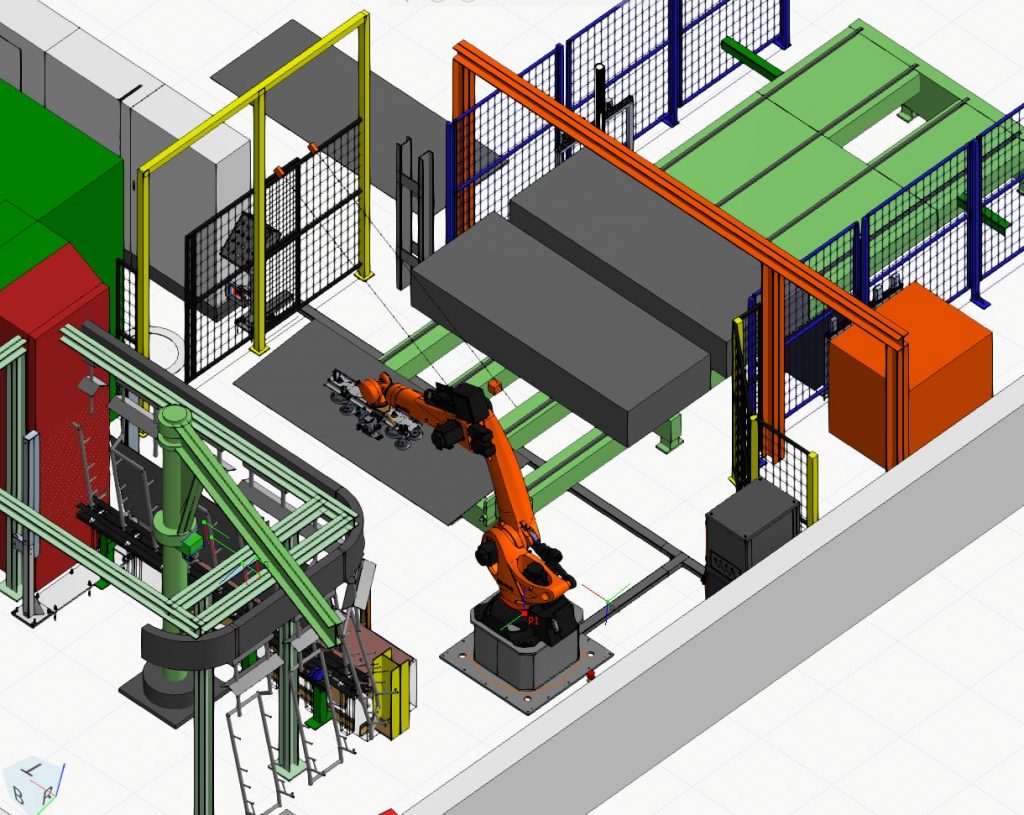
Nach einer gründlichen Analyse der Produktionsabläufe und der vorhandenen Technologien entwickelten wir ein Konzept für die Automatisierung des Abnahmeprozesses. Wir installierten einen 6-Achs-Roboter, der die Sandgestrahlten Bleche sicher und zuverlässig aus der Durchlauf-Sandstrahlanlage entnimmt und auf ein Förderband legt. Der Roboter war so programmiert, dass er die Bleche in der richtigen Position greift und auf das Förderband legt, um Beschädigungen zu vermeiden.
Das Ergebnis war beeindruckend: Der Abnahmeprozess wurde vollständig automatisiert und die Produktivität der Produktion erhöhte sich signifikant. Zudem wurde die Sicherheit der Mitarbeiter verbessert, da sie nicht mehr manuell schwere Lasten heben und tragen mussten.
Durch die Automatisierung des Abnahmeprozesses konnten wir unserem Kunden helfen, die Effizienz und Sicherheit seiner Produktion zu erhöhen und gleichzeitig die Arbeitsbedingungen für die Mitarbeiter zu verbessern.
Technische Herausforderungen des Projektes:
- Ansaugen der Bleche von einer bewegten Hängebahn
- Bewegungssynchronisation des Roboters und der Hängebahn
- Schutzzaunkonzept und Ausschleusung der Fertigteilstapel
Produktionsablauf:
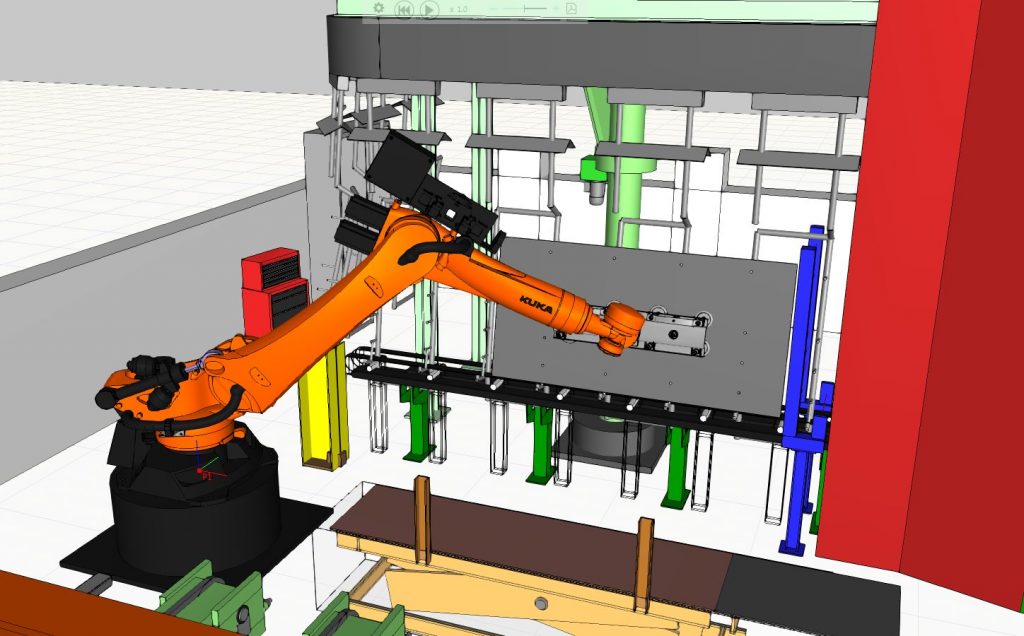
Nach Aktivierung der Roboterautomatik bewegt sich der Roboter mit seinem Vakuumgreifer vor die Hängebahn. Sobald das erste Blech ausgeschleust wird, synchronisiert der Roboter seine Geschwindigkeit mit der Bewegung des Blechs auf der Hängebahn und saugt es während der parallelen Bewegung an.
Die Ansaugposition des Blechs wird anhand der Produktionsdaten aus der übergeordneten Steuerung bestimmt, um die geometrische Mitte des Blechs zu erreichen. Sobald der einstellbare Unterdruck erreicht ist, hebt der Roboter das Blech von der Hängebahn ab.
Das abgenommene Blech wird gemäß den Vorgaben des Bedieners auf einem Kettenförderer gestapelt. Dabei erfolgt die Ablage taktil mithilfe von Federstößeln am Greifer, um eine präzise Positionierung des Blechs auf dem Stapel zu gewährleisten.
{kind=link}
{kind=link}
{kind=link}
Branche:
Stahl- und Blechproduktion
Automatisierter Prozess:
Automatisierte Entladung einer Sandstrahlanlage für Blechprodukte
Eingesetzte Roboter:
KUKA Roboter
Projekt Stichworte:
Hängebahn automatisiert entladen
conveyor tracking
Abnehmen von Bauteilen von einer bewegten Hängebahn mit Robotern
Bewegungssynchronisation Roboters – Hängebahn
Sebastian Graw
Vertrieb Robotik & Automation
| Telefon | +49 (0)2841-1802.83 |
|---|---|
| Telefax | +49 (0)2841-1802.50 |
| Mobil | +49 (0)152-28950491 |
| vertrieb.roboter@momac.de |