Automatisierung einer 800t Hydraulik-Presse zur Ziehteilfertigung mit einem KUKA-Roboter
Technische Herausforderungen des Automatisierungsprojektes:
Das Automatisierungsprojekt stellt uns vor mehrere technische Herausforderungen. Zunächst müssen wir die „alte“ Hydraulikpresse automatisieren und dabei alle wichtigen Funktionalitäten wie NOT-HALT und die sichere Abfrage von „Presse OT“ implementieren. Zudem müssen wir ein Greifkonzept entwickeln, das in der Lage ist, eine große Anzahl von Bauteilgeometrien zu handhaben. Ebenfalls müssen wir ein Sicherheitskonzept erstellen, das den Zugang zum Automatisierungssystem und dem umliegenden Bereich einschränkt, während weiterhin manuelle Tätigkeiten wie Werkzeugwechsel und manuelle Produktion uneingeschränkt möglich sind.
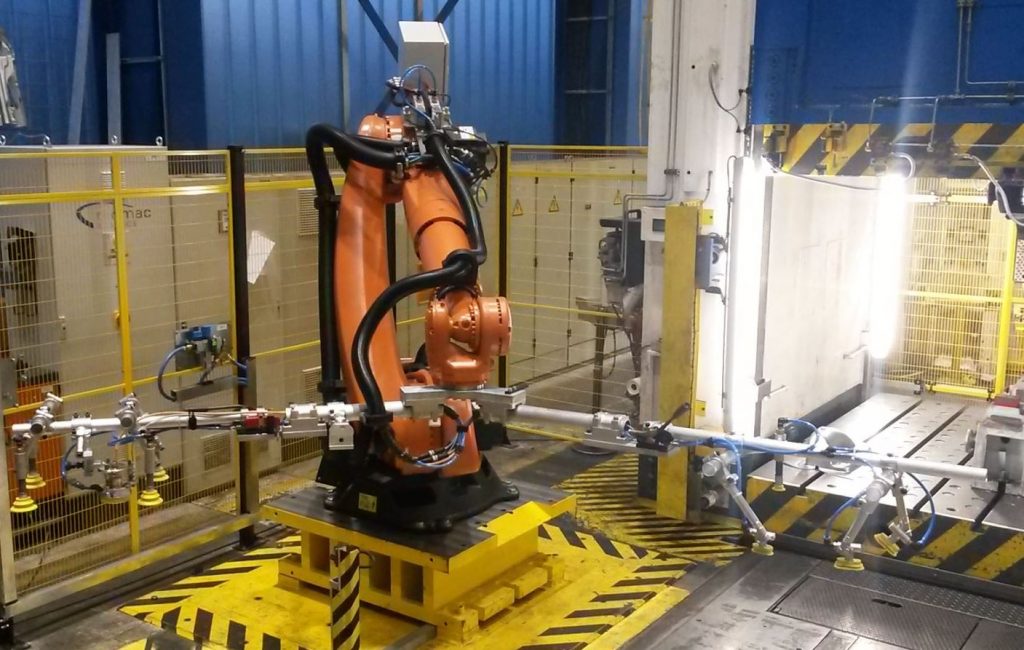
Für das Bauteilhandling setzen wir auf einen KUKA Roboter KR150 R3700 mit einer KRC4-Steuerung. Um Platinen und Fertigteile zu handhaben, haben wir den Roboter mit einem bauteilcodierten Doppelgreifer ausgestattet. Der Produktionsablauf beginnt damit, dass der Roboter mit dem Greifermodul für die Rohplatinen über den Platinenstapel fährt und eine Rohplatine mit Hilfe von Saugnäpfen aufnimmt. Während des Greifvorgangs werden die Rohplatinen durch Spreitzmagnete vereinzelt.
Die im Greifer integrierte Doppelblechabfrage prüft vor dem nächsten Prozessschritt, ob nur eine Platine sicher gegriffen wird.
Nach einer erfolgreichen Doppelblechabfrage fährt der Roboter vor die Presse, entnimmt das Fertigteil und legt das Rohteil ein. Sobald der Roboter den Pressenbereich verlässt, wird der Pressenhub freigegeben. Während des Pressvorgangs legt der Roboter das Fertigteil auf ein Förderband, um es auszuschleusen und einer Endkontrolle zu unterziehen. Danach wiederholt der Roboter den Bestückungsvorgang der Presse mit dem Greifen der nächsten Rohplatine.
{kind=link}
{kind=link}
{kind=link}
Branche:
Land- und Baumaschinenindustrie
Automatisierter Prozess:
Bestücken und Entladen einer Hydraulikpresse / Tiefziehpresse in der Kaltumformung
Eingesetzte Roboter:
KUKA Roboter KR 150 R3700
Projekt Stichworte:
Ziehteilfertigung
Doppelgreifer
Doppelbechkontrolle
Platinenhandling
Fertigteilhandling
Spreitzmagnete
KUKA Roboterzelle
Pressenautomation
Pressenverkettung
Pressenautomation
Pressenbeschickung
Sebastian Graw
Vertrieb Robotik & Automation
| Telefon | +49 (0)2841-1802.83 |
|---|---|
| Telefax | +49 (0)2841-1802.50 |
| Mobil | +49 (0)152-28950491 |
| vertrieb.roboter@momac.de |