Zustand der Roboteranlage zum automatisierten Palettieren von Dachziegeln vor der Modernisierung:
Zum Palettieren von Dachziegeln wurde ein alter KUKA Roboter mit einer KRC32 Steuerung eingesetzt. Dieser wurde in den 90er Jahren beim Aufbau des Dachziegelwerks integriert.
Die Roboterkinematik und Steuerung hat zurzeit auf Grund ihres Alters immer mehr technische Störungen.
Ersatzteile für die alte Generation sind bei Kuka nicht mehr vorhanden, da diese Generation seit einiger Zeit abgekündigt ist.
Die aktuellen Prozessschritte beim automatisierten Palettieren von Dachziegeln bestehen bislang aus dem Palettieren der Dachziegel auf eine Europalette und dem Setzen von „vertikalen Zwischenlagen“, als Abstandshalter zu den palettierten Reihen (max. 2 „vertikale Zwischenlagen“ / eine Ausrichtung).
Die Europaletten werden über einen Palettenspeicher / Stapelanlage und einer Fördertechnik der Roboterzelle zugeführt. Die jeweilige zu Bestückende Europalette wird auf der Fördertechnik gespannt bzw. fixiert.
Die Fördertechniken zum Zuführen der Euro- Paletten und der Dachziegel haben eine eigene Steuerung.
Für das Setzen der „stehenden Zwischenlagen“ ist ein Vereinzler vorhanden, der mit über die Steuerungstechnik der Fördertechnik bzw. der Stapelanlage gesteuert wird. Bei der Steuerung handelt es sich um eine Siemens S5 Steuerung.
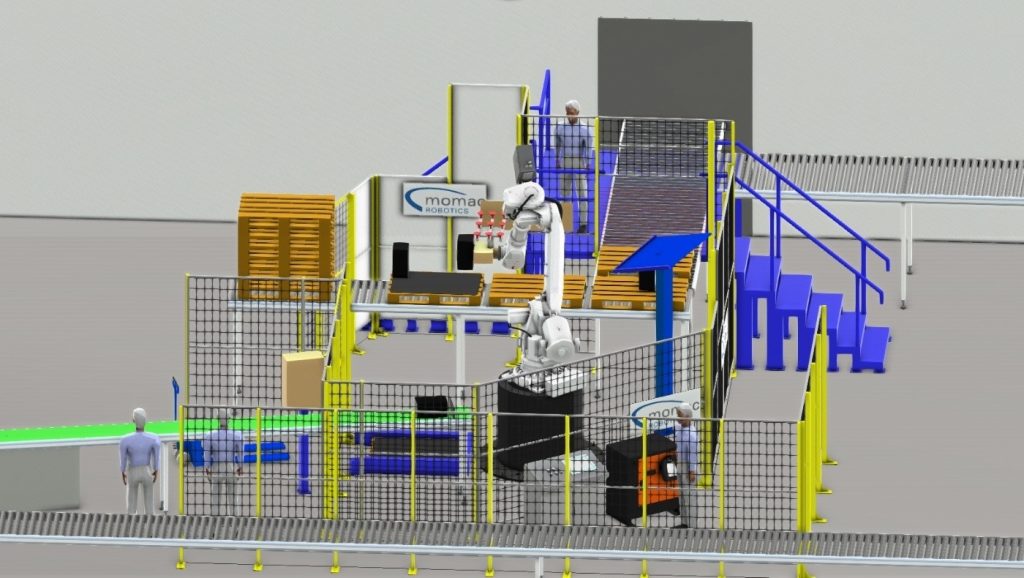
Konzept zur Modernisierung der Roboteranlagen zum automatisierten Palettieren von Dachziegeln:
Das folgende Konzept beschreibt die Realisierung des Austausches der Roboterkinematik mit zusätzlicher Funktion des legen der Zwischenlagen (oben und unten), sowie die Realisierung der Steuerung und Sicherheitstechnik für die Roboterkinematik / Roboterzelle.
Die Automatisierung wird mit einem ABB 6-Achs Roboter Typ IRB 6700 mit einer max. Reichweite von 3200 mm und einer max. Traglast von 150 kg eingesetzt.
Der Roboter übernimmt in dem Prozess das Handling der Bauteile, den sogenannten Dachziegeln und das Handling der Zwischenlagen (vertikal und horizontal).
Das Robotersystem zum automatisierten Palettieren von Dachziegeln wird in die vorhandene Schutzvorrichtung integriert.
Um das Sicherheitskonzept auf den aktuellen Stand der Technik zu bringen, sind Vorkehrungen hinsichtlich der Sicherheitstechnik zu treffen.
Die alte Zugangstüre der Roboterzelle automatisierten Palettieren von Dachziegeln wird mit einem neuen Sicherheitstürschalter mit Türzuhaltung versehen.
Ein neuer Zugang wird in die Schutzvorrichtung integriert, dieser wird erstmals bei dem Grobkonzept zwischen den zwei Fördertechniken geplant und soll zum Einschleusen einer Europalette mit gestapelten Zwischenlagen dienen.
An dem Bereich zum Ausschleusen der automatisiert palettierten Paletten wird ein Teil der Schutzumzäunung erweitert, bzw. erhöht.
Des Weiteren wird ein neues Sicherheitslichtgitter zum Ausschleusen der Paletten montiert und in die Sicherheitssteuerung eingebunden.
Diese Vorkehrungen sind nötig um ein Eingreifen und Betreten des Roboterbereichs beim automatisierten Palettieren von Dachziegeln zu verhindern.
Materialzuführung der Zwischenlagen beim automatisierten Palettieren von Dachziegeln (oben und unten):
Es wird ein Stellplatz zum Zuführen einer Europalette mit gestapelten Kunststoff Zwischenlagen in die Zelle
integriert. Zur Positionierung der Palette wird ein mechanischer Anschlag eingesetzt.
Die Schutzumzäunung der Roboterzelle zum automatisierten Palettieren von Dachziegeln wird hierfür mit einem neuen Zugang versehen und über eine Türzuhaltung abgesichert.
Handling der neuen Zwischenlagen beim automatisierten Palettieren von Dachziegeln:
Für das Handling der Zwischenlagen wird ein Vakuumgreifer an der neuen Greifertechnik adaptiert.
Zur Höhenerfassung der zugeführten Zwischenlagen (1200 mm x 800 mm) wird ein Lasermesstaster am Roboter vorgesehen, hierrüber wird die Höhe der zugreifenden Zwischenlage erfasst. Zum Ausrichten der Zwischenlage wird eine mechanische Schwerkraftzentrierung in die Roboterzelle installiert.
Auf eine Europalette werden insgesamt zwei horizontale Zwischenlagen gelegt. Eine als Bodenlage vor dem Palettiervorgang und eine weitere als Abschlusslage nach palettierten Lagenbild.
Werkstückhandling beim automatisierten Palettieren von Dachziegeln:
Der Roboter wird mit einer neuen Greiferkonstruktion zum Handling der Dachziegel ausgestattet.
Prinzip und Aufbau des Greifersystems ähnlich wie bei der vorhanden Automatisierung.
Die Dachziegel werden an der vorhanden Fördertechnik aufgenommen.
Um die Genauigkeiten beim Greifen an der Fördertechnik zu erhöhen, werden die Dachziegel an einen mechanischen Anschlag gefördert werden.