Bei einem Zulieferunternehmen der Automobilindustrie erfolgte das Handling von Bremsbacken über Jahre mit Robotern an einem Güdel Jetportal.
Auf Grund der nicht mehr gewährleisteten Ersatzteilverfügbarkeit und einer Fertigungsmodernisierung wurden die alten Roboter ausgetauscht und alle Anlagenkomponenten auf den aktuellen technischen Stand gebracht.
Im Fokus des Umbauprojektes standen:
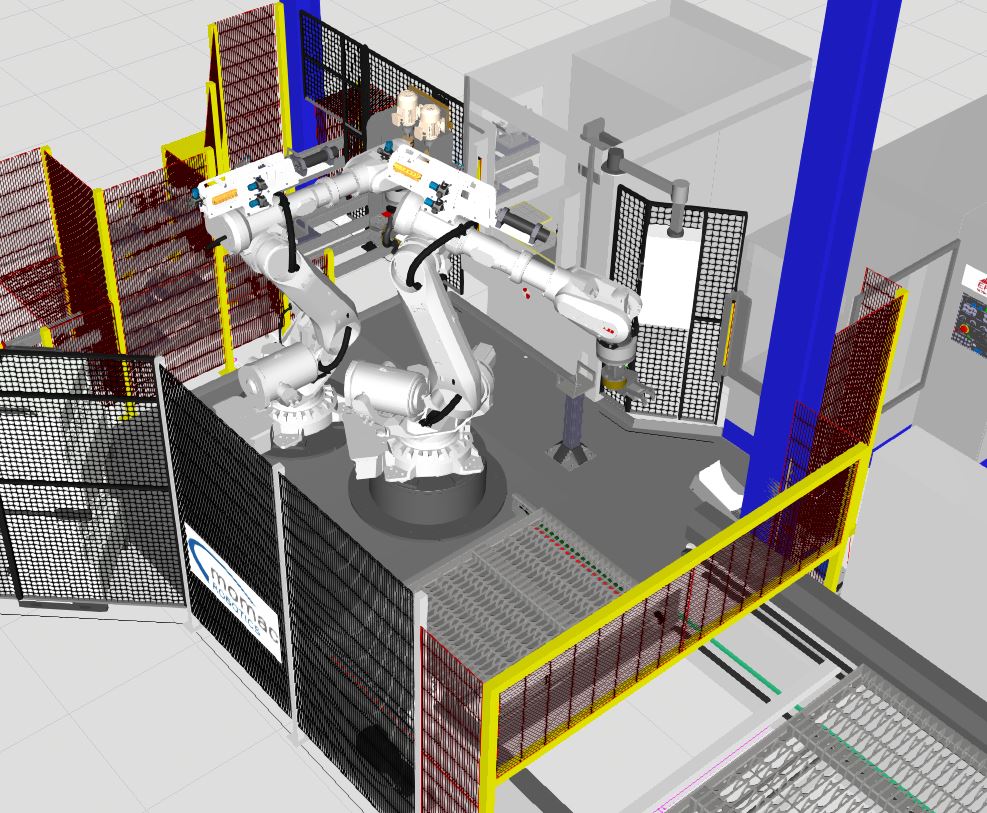
- die Minimierung der Stillstands- bzw. Produktionsausfallzeiten durch vollständige virtuelle Inbetriebnahme und detaillierte Planung der Montagearbeiten
- Aufbau/Implementierung einer redundanten Fertigungsstrategie bei Ausfall eines Stranges in der Materialzuführung
- Erhöhung der Anlagenverfügbarkeit durch Schwachstellenanalyse und Einbau neuer Technologien
- Anpassung/Überarbeitung des Bedienkonzeptes
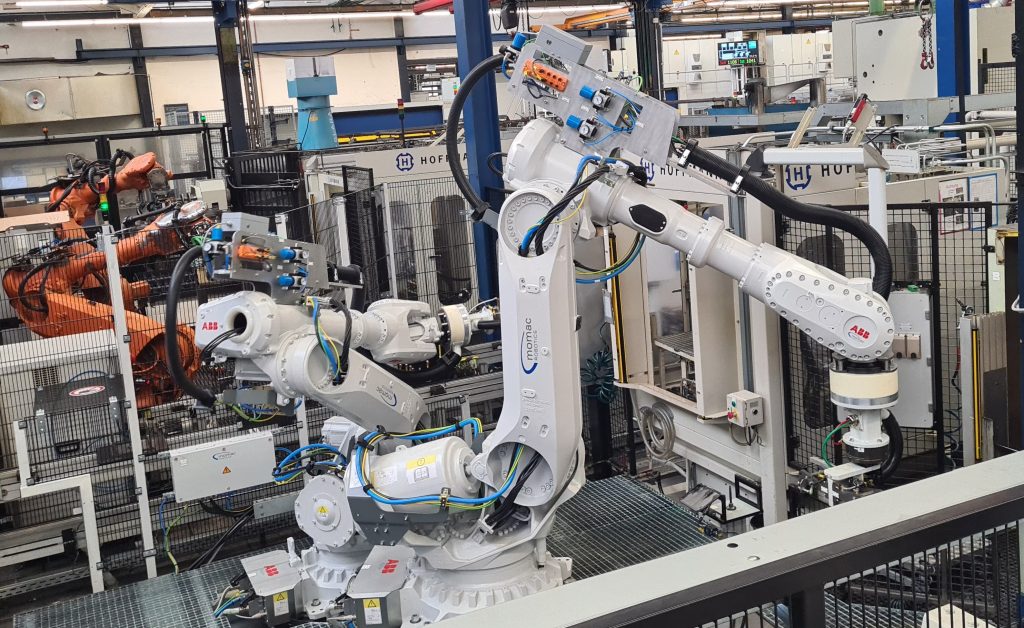
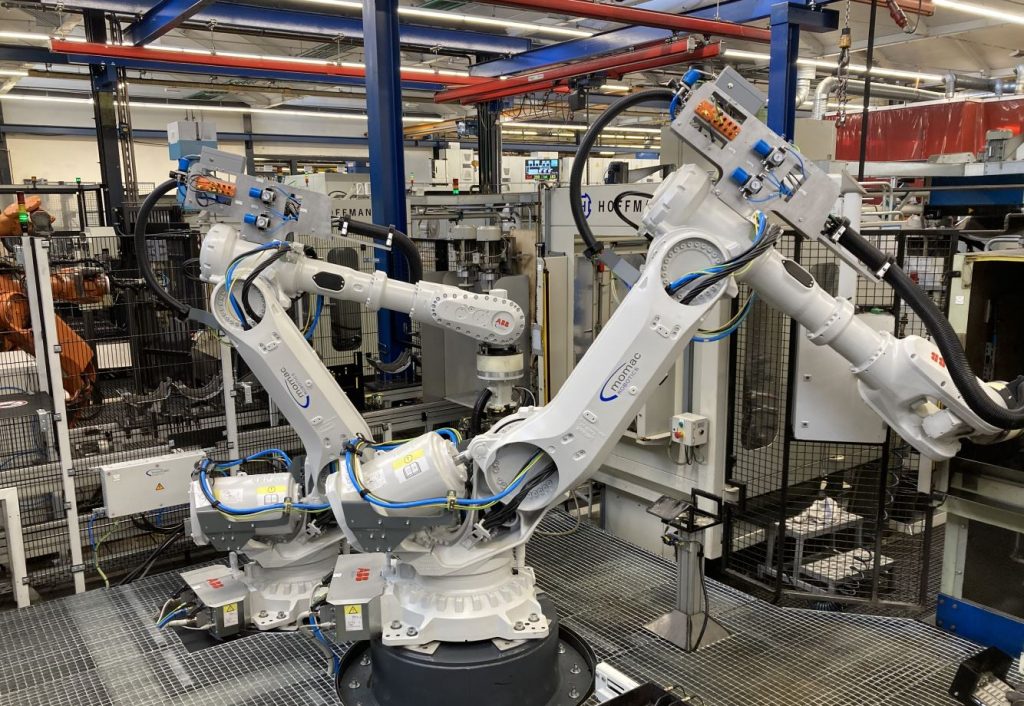
Das Handling der Bremsbacken übernehmen jetzt zwei IRB 6700-155/2.85 der Firma ABB. Beide Robotereinheiten sind auf dem Boden montiert und verfügen über einen Doppelgreifer zum Materialhandling. Die Medienversorgung erfolgt über ein geschlossenes Schlauchpaket in Kombination mit einer speziell entwickelten Drehdurchführung an der 6. Achse.
Roboter zur Aufnahme der Bremsbacken von den Zuführstrecken
Roboter 1 entnimmt die Bremsbacken von einem der beiden Zuführstränge und führt diese der ersten Bearbeitungsmaschine zu. Während der Bearbeitung wird die nächste Bremsbacke aufgenommen, so dass ein schneller Wechsel (Entnahme bearbeitete Bremsbacke à Einlage unbearbeitete Bremsbacke) nach Abschluss der Bearbeitung erfolgen kann. Die entnommene Bremsbacke wird im Anschluss auf eine statische Zwischenablage für Roboter 2 bereitgestellt.
Roboter zur Beschickung der Bearbeitungsmaschine
Roboter 2 bestückt die zweite Bearbeitungsmaschine und stapelt im Anschluss die Bremsbacke in so genannte SKIDs für den weiteren innerbetrieblichen Transport. Die Zu- und Abfuhr der SKIDs erfolgt mittels vorhandener Kettenfördertechnik, welche im Zuge des Umbaus modernisiert und teilweise ersetzt wurde.
Projektablauf ab Lieferung:
- Demontage der alten Robotereinheiten (4t schweres Linearportal) mittels Autokrane, sowie aller nicht mehr benötigten Komponenten
- Überarbeitung der vorhandenen Kettenfördertechnik parallel zur weiteren Montage und anschließende Remontage der Einheit
- Implementierung und Montage einer neuen, platzsparenderen Lösung zum Umsetzen der SKIDs von der Zuführung (oben) auf den Abfuhrstrang (unten)
- Montage der ABB Robotereinheiten inkl. Steuerungen
- Montage und Anschluss des Hauptsteuerschranks und Schnittstellenanbindung an die vorhandenen Bearbeitungsmaschinen
- Inbetriebnahme verschiedener Produkt- und Produktionsvarianten
- Schulung der Mitarbeiter
- Begleitung Produktionshochlauf
Durch die komplette simulatorische Abbildung und Inbetriebnahme der Anlage konnten die Ausfallzeiten auf Kundenseite auf ein absolutes Minimum reduziert werden.
{kind=link}
{kind=link}